![[Imágenes de origen: Adobe Stock]](https://fc-bucket-100.s3.amazonaws.com/wp-content/uploads/2026/06/16115204/p-1-91558827-AI-and-declining-cognitive-function.webp)
![[Foto: ANGELA WEISS/AFP vía Getty Images]](https://fc-bucket-100.s3.amazonaws.com/wp-content/uploads/2026/06/16133035/p-1-91560494-spacex-is-now-a-bigger-company-than-amazon-and-microsoftby-chris-morris.webp)
![[Imagen: Cortesía]](https://fc-bucket-100.s3.amazonaws.com/wp-content/uploads/2026/06/15125341/mercado-libre-amazon-inversiones-mexico.jpg)
![[Foto: Getty Images]](https://fc-bucket-100.s3.amazonaws.com/wp-content/uploads/2026/06/16103250/INC-Masters-Fast-Company-publishing-2026-06-15T144610.759-1.webp)
 Fangzheng Liu/MIT Media Lab, Unsplash
Fangzheng Liu/MIT Media Lab, Unsplash




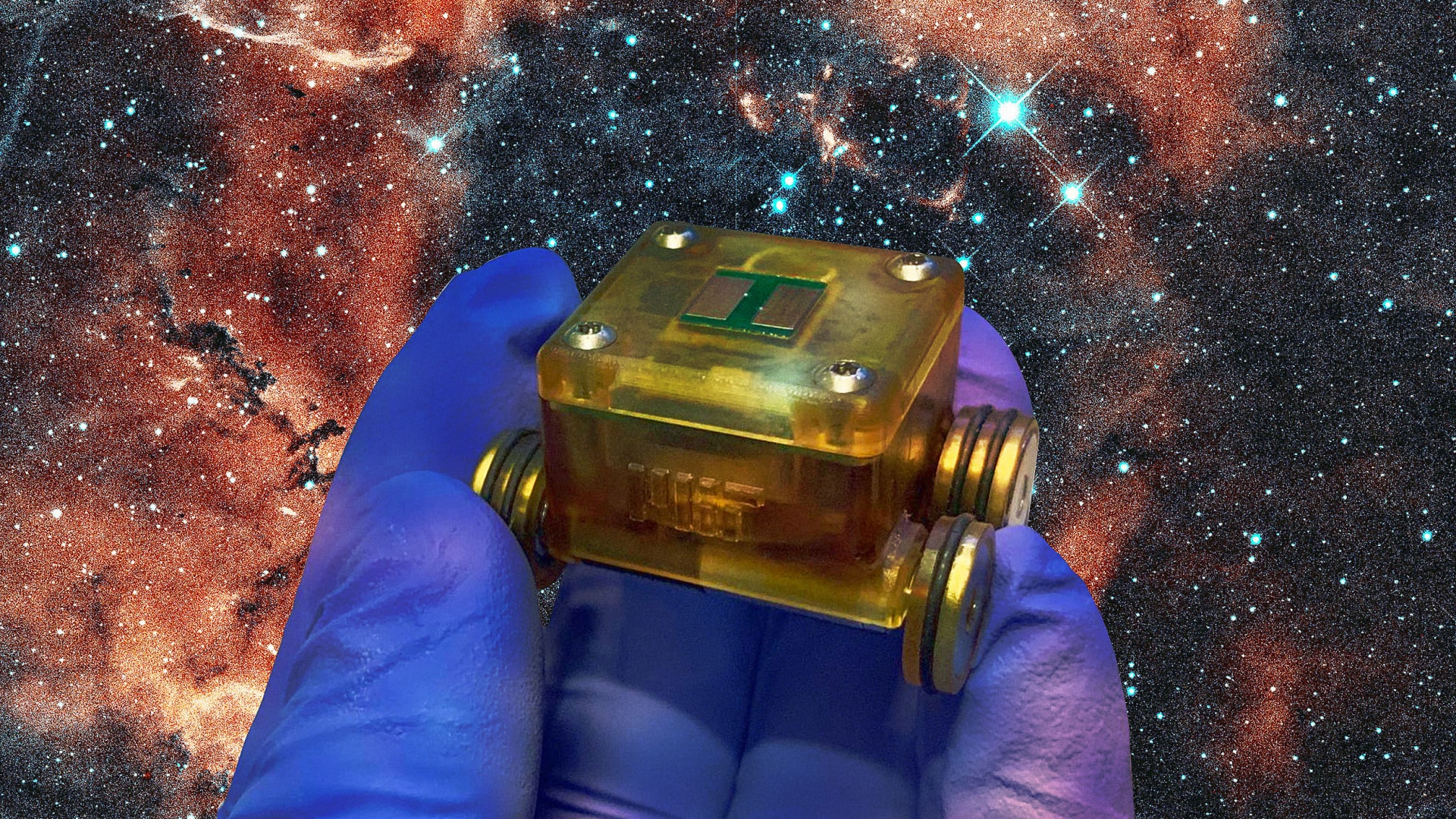
La idea de tener robots que ayuden a los humanos en naves espaciales, estaciones orbitales y bases en planetas remotos es tan antigua como la ciencia ficción misma, pero han pasado décadas hasta que alguien propuso una idea para un “astromecánico” (piensa en R2-D2 de Star Wars) que realmente tenga sentido y no parezca un simple truco: los AstroAnts.
Creado por un equipo de ingeniería del Instituto Tecnológico de Massachusetts (MIT) liderado por el estudiante de posgrado Fangzheng Liu, los AstroAnts son rovers aproximadamente del tamaño de un cochecito Hot Wheels. Se desplazan por las superficies de vehículos espaciales y estructuras utilizando ruedas magnéticas, cada uno equipado con diferentes sensores para monitorear las constantes de la nave pulgada por pulgada. La idea es que, al vigilar constantemente la temperatura y la integridad estructural de sus medios de transporte cósmicos, las naves espaciales sean más resistentes a las condiciones extremas del espacio y los astronautas estén más seguros.
Monitorear la salud de una nave espacial
Actualmente, los humanos en el espacio dependen de un conjunto muy limitado de sensores colocados en su nave espacial para mantener el control del estado de sus cápsulas y módulos habitables. Cuando micrometeoroides impactan su superficie a varias veces la velocidad del sonido, o cuando el hardware se desgasta debido al envejecimiento, errores u otras razones, la tripulación no siempre se entera de estos incidentes con tiempo suficiente para solucionarlos.
Puede ser difícil identificar problemas en las naves espaciales. Por ejemplo, cuando la ISS detecta una caída en la presurización debido a un pequeño agujero en el casco. En ocasiones, el problema no puede solucionarse porque es un error fatal, como lo que ocurrió durante la misión Apollo 13, cuando los tanques de oxígeno de la nave explotaron debido a una combinación de fallos técnicos, problemas de cableado y daños previos que ocurrieron durante las pruebas en tierra.
Esa explosión ocurrió cuando se encendió un ventilador dentro del tanque de oxígeno, provocando un cortocircuito en el cableado dañado, lo que llevó a una falla catastrófica. En ese momento, no existía un sistema en tiempo real para monitorear en detalle las condiciones internas de los componentes de la nave espacial, lo que hacía imposible predecir o prevenir esta falla específica.

Quizás, si la nave Apollo 13 hubiera contado con algunos AstroAnts recorriendo el interior de la nave, pasando por el área del tanque de oxígeno y otros componentes, podrían haber detectado señales tempranas de daños internos o fallas en el cableado con sus sensores, cosas que eran invisibles para la tripulación en ese momento. Incluso si la ruptura no fuera completamente evitable, tener AstroAnts moviéndose por la nave espacial podría haber permitido detectar anomalías estructurales o irregularidades de temperatura antes de que ocurriera el evento catastrófico.
Y aunque esto es una especulación histórica ficticia, detectar problemas que puedan poner en riesgo las misiones es lo que los AstroAnts están diseñados para hacer, como me cuenta la Dra. Cody Paige, directora de la Iniciativa de Exploración Espacial del MIT Media Lab, durante una videoconferencia. Trabajando en enjambres, los pequeños robots móviles pueden equiparse con diversas cargas útiles de sensores para inspeccionar las superficies de las naves espaciales, monitorear la temperatura, detectar perforaciones y hacer cualquier cosa que los ingenieros puedan imaginar según su carga útil. “Liu está desarrollando una versión con un pequeño martillo para identificar problemas debajo de la superficie”, dice.
El desarrollo de AstroAnt
El proyecto AstroAnt comenzó de la manera más extraña y tangencial que se pueda imaginar, cuenta Paige. “Los AstroAnts en realidad comenzaron con otro estudiante como un dispositivo vestible”, dice. “Eran robots muy pequeños diseñados para moverse sobre la superficie de la ropa”.
Esa tecnología vestible evolucionó rápidamente en algo con implicaciones mucho mayores. “[El concepto] luego se desarrolló para una aplicación espacial, y Fangzheng Liu lo llevó al proyecto actual, que es AstroAnt”, explica Paige.
Cada AstroAnt está equipado con cuatro ruedas magnéticas, lo que le permite adherirse y navegar por cualquier superficie metálica. Pueden hacer su trabajo en aterrizadores y rovers en otro planeta, en la Estación Espacial Internacional, en una nave espacial en ruta a la Luna o Marte, o en cualquier cosa que puedas imaginar. “Mientras haya una superficie magnética, funcionará”, señala Paige.
La fuerza de los AstroAnts radica en su versatilidad y resistencia, producto de su naturaleza en red. Diseñados para trabajar juntos como enjambres, monitorearán la salud de las naves espaciales, rovers y estaciones espaciales, operando juntos para cubrir áreas extensas que serían tan peligrosas o lentas de inspeccionar visualmente que sería imposible hacerlo para los humanos.
“Si tuvieras un enjambre de AstroAnts que pudiera recorrer el exterior de la estación espacial y encontrar dónde podría estar ese impacto [de micrometeoroides]… eso podría ahorrar mucho tiempo y hacerlo más seguro”, explica Paige. Un AstroAnt en el enjambre puede encontrar rápidamente la perforación y advertir a la tripulación, para que puedan ir allí y arreglarla si es necesario.
La alternativa, señala Paige, sería cubrir toda la superficie de una nave con decenas de miles de sensores, algo que no sería rentable, y agregaría una complejidad extrema y peso adicional al vehículo.
El diseño actual de los AstroAnts podría inspirar una generación futura más sofisticada de robots en enjambre que puedan mantener las naves además de sus habilidades de monitoreo. Recuerda esa escena en Star Wars: La Amenaza Fantasma en la que R2-D2 sale a la superficie de un fuselaje de nave espacial, adherido magnéticamente a la superficie, para encontrar y reparar algunos cables dañados. Los AstroAnts podrían hacer exactamente lo mismo algún día, asegurando que una nave espacial o una base en Marte esté siempre en perfectas condiciones. Excepto que será un ejército de hormigas, no un solo astromecánico.
Gran prueba en la Luna
La primera prueba de AstroAnt será en enero de 2025, cuando una pequeña criatura de una sola rueda llegue a la Luna a bordo del módulo de aterrizaje lunar Nova-C en el programa de Servicios de Carga Útil Comercial Lunar de la NASA como parte de la misión IM-2 de Impossible Machines.
El módulo de aterrizaje llevará el rover Plataforma Móvil Autónoma de Prospección (MAPP), construido por Lunar Outpost, con sede en Colorado. Diseñado para explorar el Polo Sur lunar, el rover emergerá del módulo de aterrizaje para comenzar su misión. El AstroAnt estará cómodamente estacionado en un pequeño garaje en la parte superior del propio rover. Una vez que el MAPP esté en movimiento, el AstroAnt saldrá de su estacionamiento y comenzará la tarea de tomar lecturas de temperatura en toda la superficie del rover. “El AstroAnt se carga en el pequeño garaje y, una vez desplegado, recogerá datos de temperatura en pequeñas porciones tipo píxel, creando un mapa de las condiciones térmicas en el rover”, dice Paige.
Aunque los AstroAnts están diseñados para trabajar como robots en red en enjambres más grandes, solo se enviará uno debido principalmente al costo. “Somos académicos, así que queremos probar uno antes de enviar toda una flota”, ríe Paige. Pero esta misión será una importante prueba de concepto, y se espera que las iteraciones futuras impliquen enjambres completos de estos robots.
Liu y el resto del equipo de AstroAnts —la científica visitante Ariel Ekblaw y el Integrador de Misiones de la Iniciativa de Exploración Espacial del MIT, Sean Auffinger— probaron los AstroAnts a principios de 2024, viajando a Lanzarote, España, donde el paisaje volcánico se asemeja a la Luna. Los resultados fueron prometedores, proporcionando datos críticos sobre la capacidad del robot para maniobrar y recopilar información. Según sus pruebas, los robots no tendrán problemas para viajar a través de superficies metálicas incluso con cambios de ángulo de 80 grados.
Aplicaciones industriales
Aunque los AstroAnts están diseñados para operar en el espacio, pueden funcionar igual de bien aquí en la Tierra. Su diseño modular y móvil en enjambre podría convertirlos en la solución perfecta para inspeccionar constantemente lugares de difícil acceso, como el interior de máquinas industriales, grandes fábricas complejas, centrales eléctricas, motores de aviones, transformadores industriales, refinerías o cualquier otro tipo de infraestructura compleja. Cualquier cosa que sea peligrosa, demasiado grande, demasiado pequeña y necesite monitoreo cercano será el hogar perfecto para estos enjambres robóticos.
La industria ya está interesada, como señala Paige sin mencionar nombres de empresas. “Hay interés en usar algo como esto para lugares de difícil acceso como el interior de un motor”, dice. Al monitorear constantemente estas instalaciones y máquinas, los robots pueden brindar un servicio invaluable para prevenir fallos críticos, solucionar problemas antes de que se conviertan en algo mayor y mantenerlas en funcionamiento a un costo menor.
Ya sea aquí en la Tierra, en órbita o en Marte, los enjambres de AstroAnts realmente tienen el potencial de cambiar fundamentalmente la forma en que diseñamos y operamos máquinas, vehículos y estructuras de cualquier tipo. Al utilizar robots en enjambre en lugar de sensores fijos, todo lo que podamos imaginar puede volverse más ágil, más eficiente, más adaptable y mucho más económico y seguro de operar a largo plazo.
![[Imagen: Michael Nagle/Bloomberg/Getty Images, Marc Atkins/Getty Images]](https://fc-bucket-100.s3.amazonaws.com/wp-content/uploads/2026/06/15093345/naming-rights-estadios-mundial-2026-fifa.jpg)
![[Imagen: Cortesía]](https://fc-bucket-100.s3.amazonaws.com/wp-content/uploads/2026/06/15115451/programas-lealtad-decathlon.jpg)
![[Foto: Instagram]](https://fc-bucket-100.s3.amazonaws.com/wp-content/uploads/2026/06/10111954/Diseno-sin-titulo-86.jpg)